Koji Hirai
- 🏠 Home
- 💁 About Me
- 📄 Resume
- 🛫 Projects
- ✉️ Contact
Hello, I am Koji Hirai, a sophomore at the University of California, Irvine majoring in Electrical Engineering. Being an Electrical Engineering student I love working with electronics, circuits, and programming. Within electrical engineering, I am especially interested in digital signal processing and wireless technologies such as radar/LiDAR, wireless communication and mesh networks. I am passionate about learning new cutting-edge technology and being able to apply the combination of my skills to solve real-world challenges.
As an engineering student, I am a part of many campus organizations such as IEEE at UCI and Commit the Change, where I develop software for non-profit organizations. I also serve as the President of the Amateur Radio Association at UCI where I explore Amateur Radio technologies. In my free time, I often explore my other interests such as plane spotting, 3D printing and tinkering with electronics like Arduinos. I also spend time in the Japanese Student Association where I socialize with other Japanese students at UCI.

Club at UCI focused on exploring radio technologies and communication. Embarking on projects such as antenna design, digital communication and equipment exploration. Building expertise in radio communication to have to capability to provide assistance during emergencies.
![]()
Designed a custom brushless DC motor controller for the drive train electrical system. Integrated motor controller with the main vehicle electrical and control system. Used C++ to develop autonomous vehicle control program.

Developed a custom sanitation drone with maximum payload of 3kg to sanitize large campus venues. Designed a custom sanitation fluid pump controller module.
Designed a Prosthetic 6th finger that can attach onto a humanhand. Finger was controlled and synced to the other fingers using a electrocardiography(ECG) sensor in the forearm which detected when the user's (real) fingers were moving.
Designed a trash sorting machine that relied on image recognition of incoming pieces of trash to sort the item into the respective bins. Awarded 3rd place at Engineering Academy Entrepreneurship Competition.
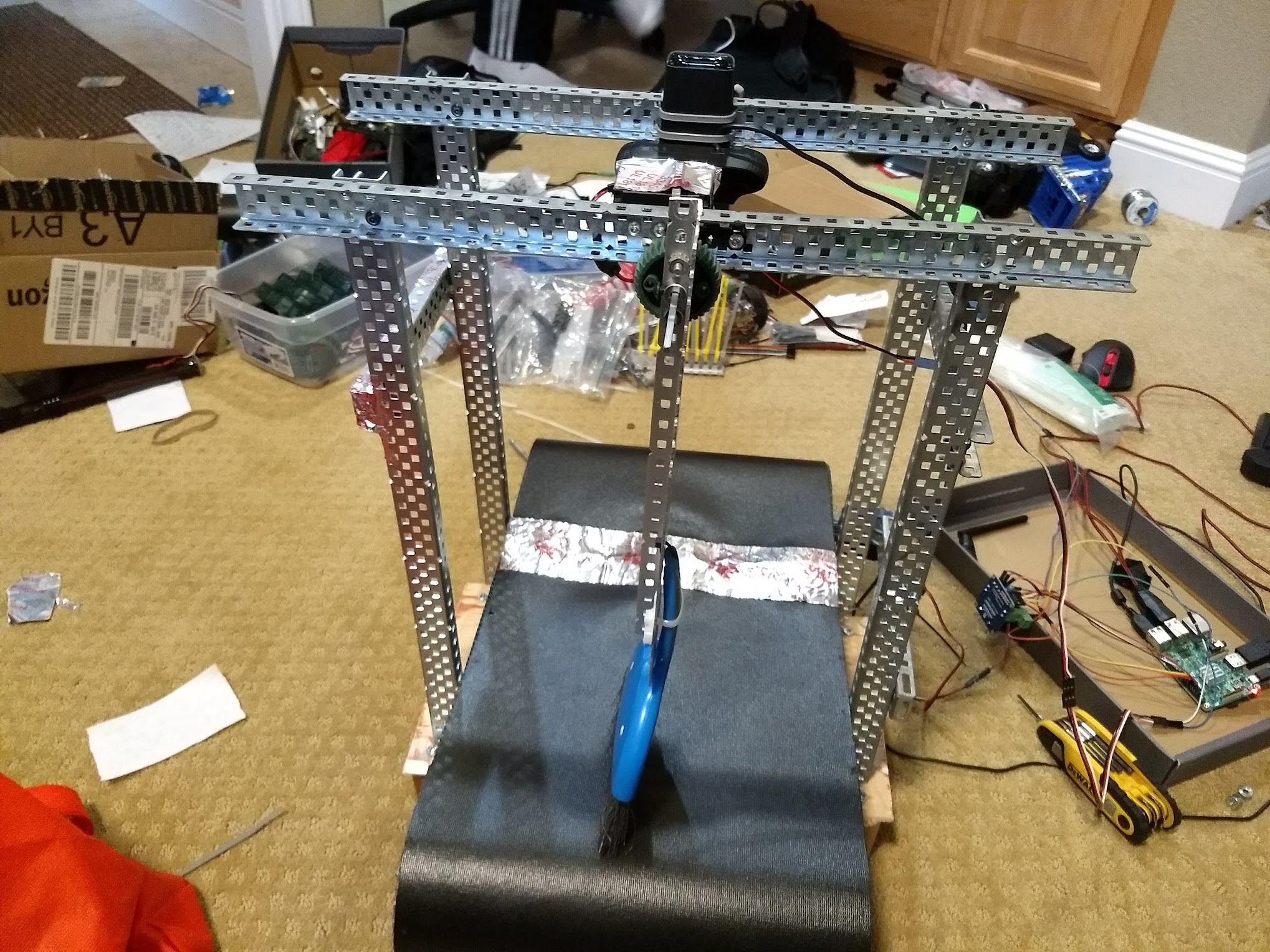
Awarded 1st place internationally out of about 200 participating teams. Reverse engineered a handheld radio to analyze its electronics circuit and components for their functionality and integration. Formulated detailed reverse engineering report which was submitted to the Online Challenge.
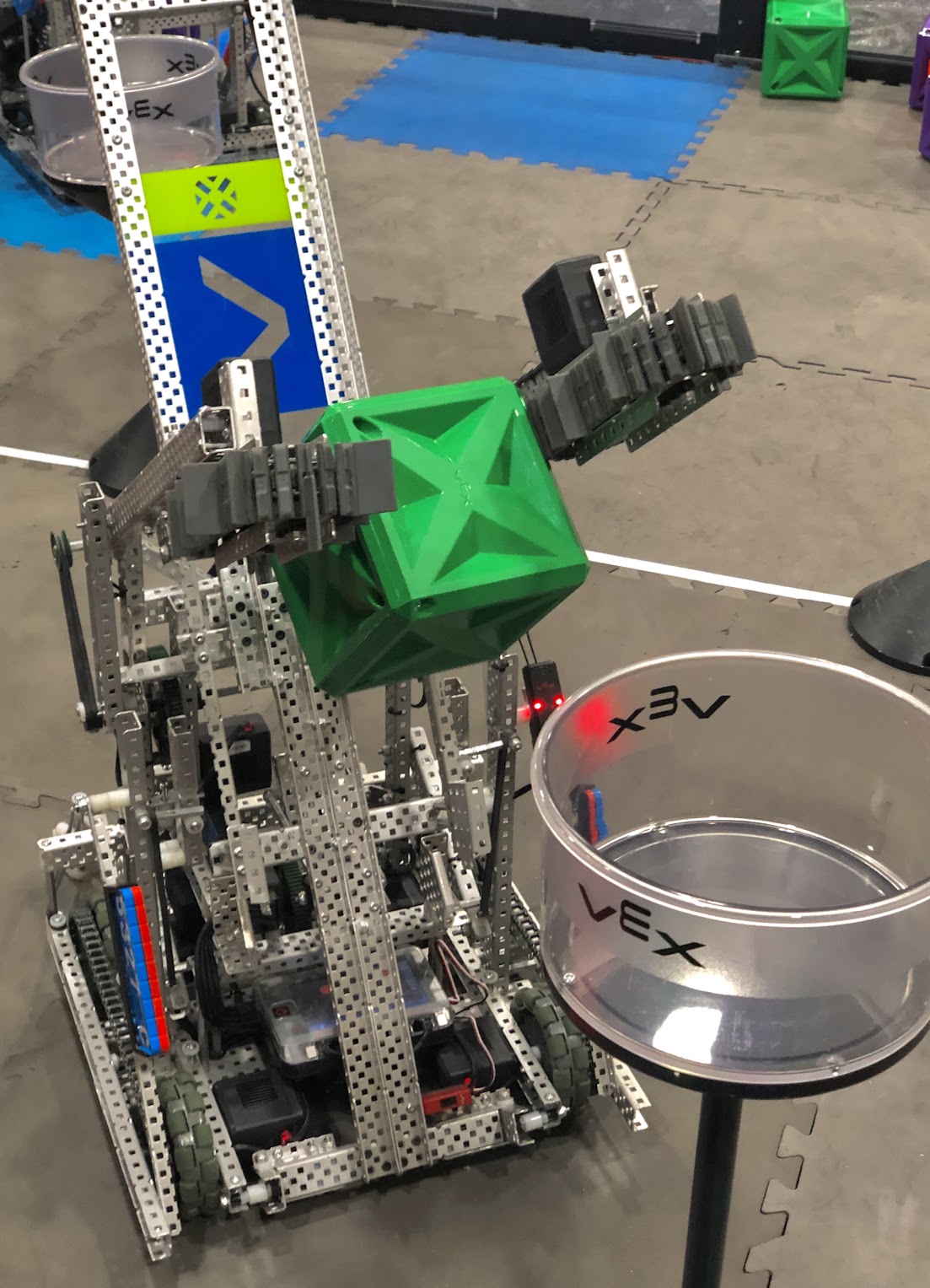
Developed new design strategy in VEX robots to electrically connect all metal on used for the chasis as a grounding solution. Eliminated electrostatic damage to robot microcontroller which increased match reliablity.
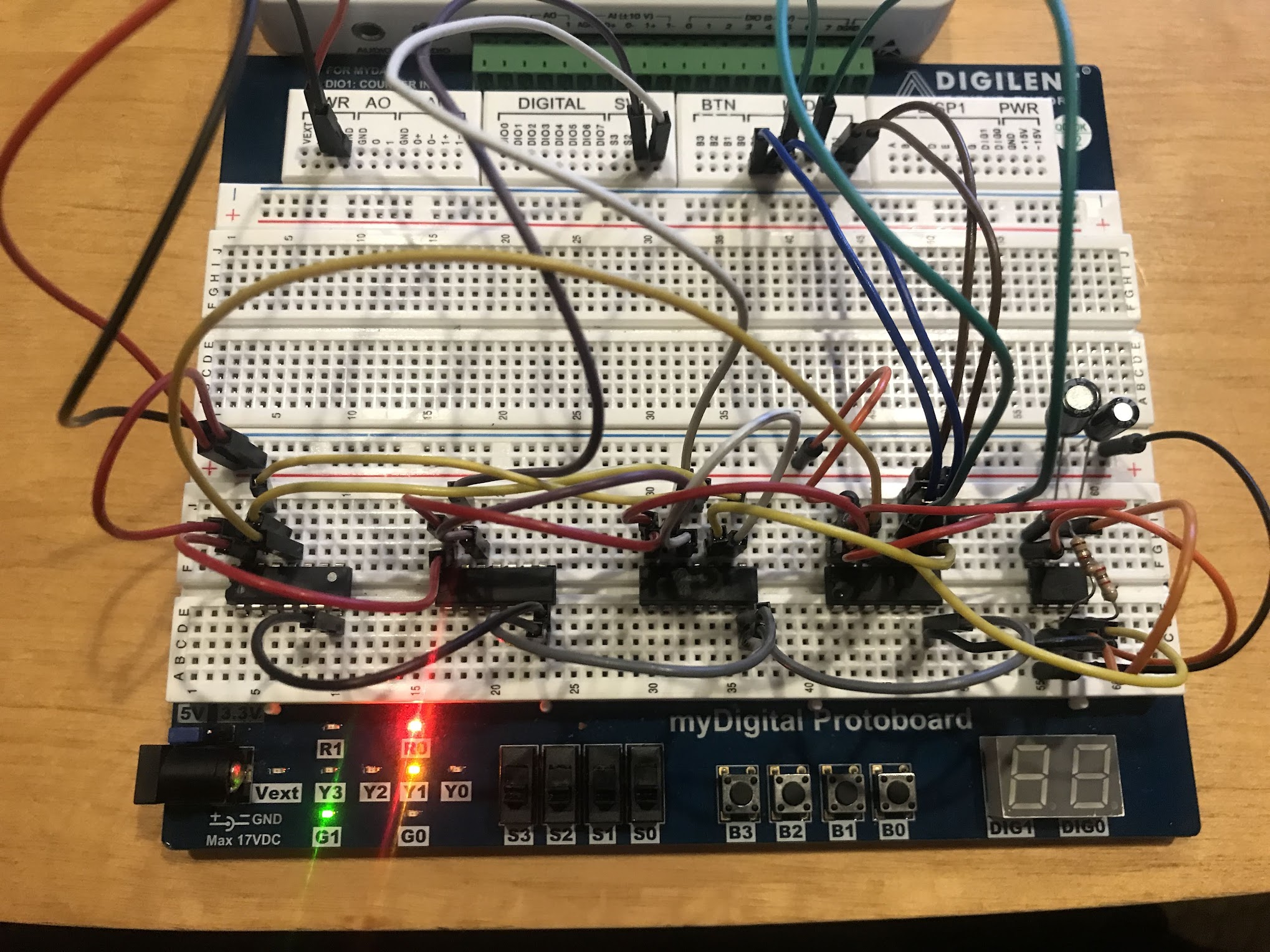
Designed a railroad switch point (junction point where 2 tracks combine into 1) controller circuit. When a train was approaching the junction, it would control the signal light to the respective track and also switch the direction of the junction to let the appraching train pass.

Designed smart glasses that interfaced with the users phone to perform various tasks. The camera allowed for image recognition of items within the view of the user.
Role: President
Club at UCI focused on exploring radio technologies and communication. Embarking on projects such as antenna design, digital communication and equipment exploration. Building expertise in radio communication to have to capability to provide assistance during emergencies. Our goal is to provide resources for hands-on exploration of radios to build understanding beyond classroom physics and engineering.
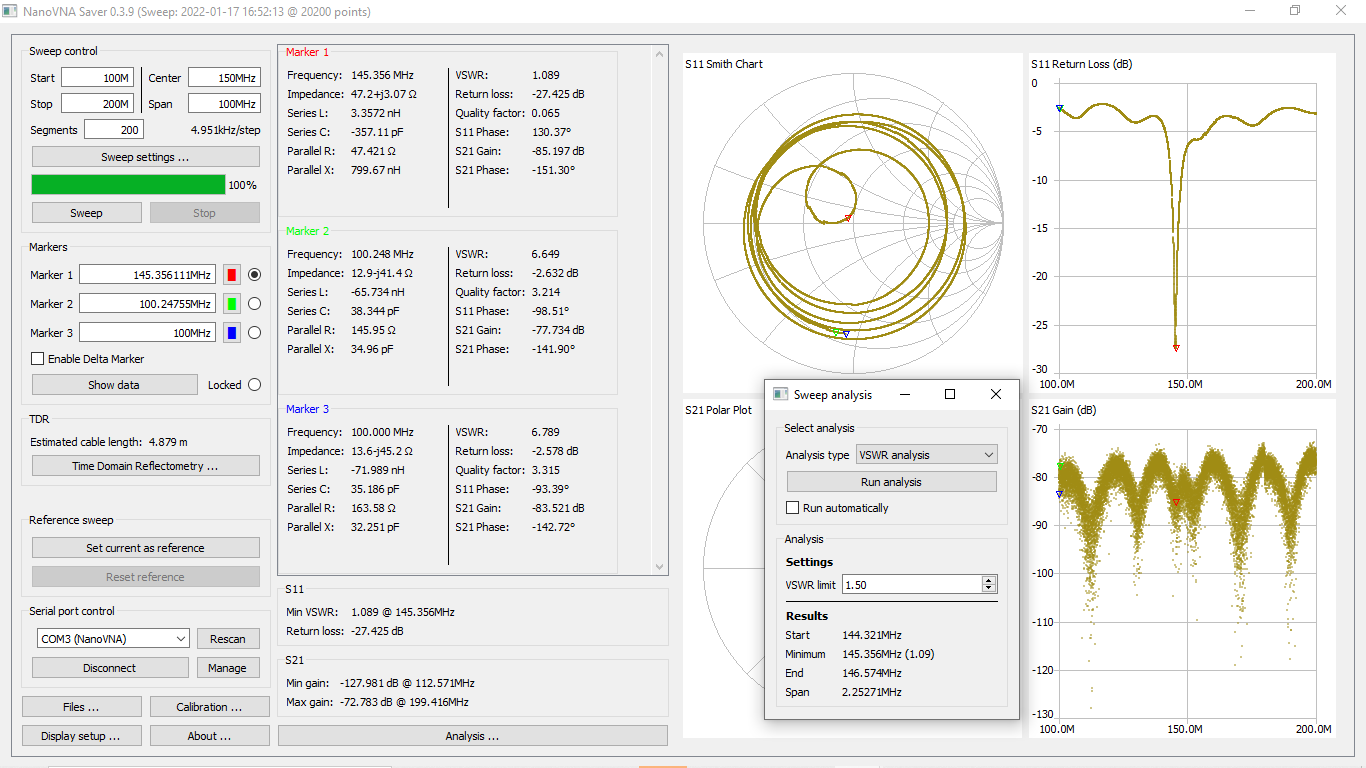
Built a 2 meter band (144-148MHz) antenna using the Hentenna design. The antenna was built using simple materials (copper pipes, wires and coax). After the general assembly of the antenna based on the general Hentenna design, further tuning was done through the use of a vector network analyzer.

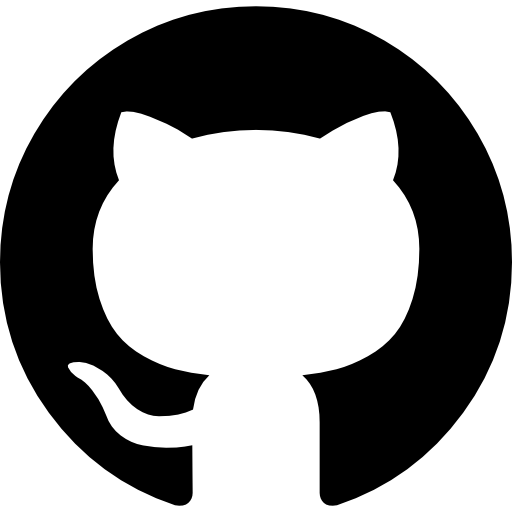
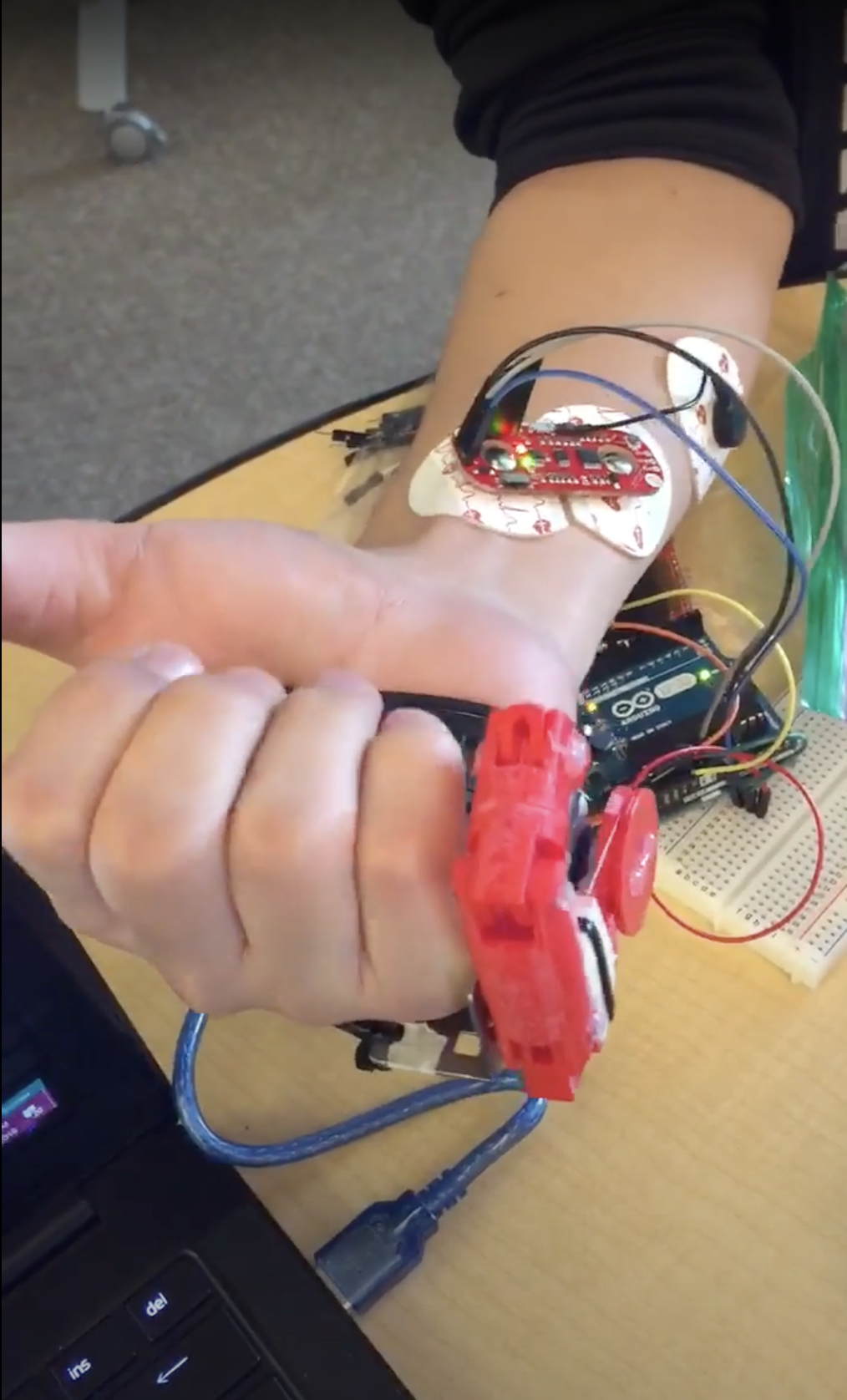
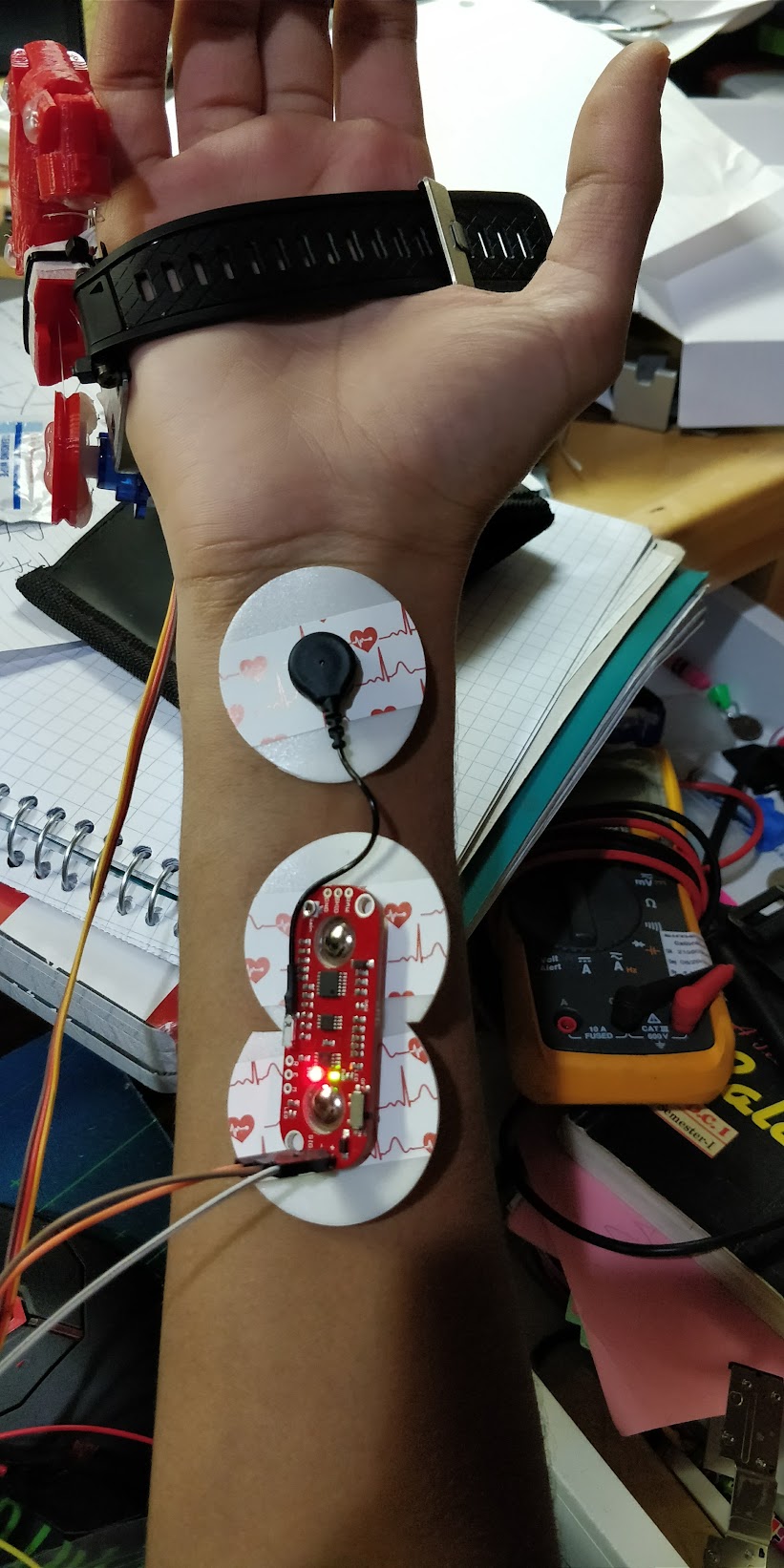
Designed a Prosthetic 6th finger that can attach onto a humanhand. Finger was controlled and synced to the other fingers using a electromyographyy(EMG) sensor in the forearm which detected when the user's (real) fingers were moving.
The objective of this project was to explore the creation of realistic prosthetics that was able to integrate into existing human life and work flows. The idea of creating a 'sixth finger' was also out of the curiosity of exploring the possible benifits from having an extra finger in daily life. The main goal was to control this finger as naturally as possible without the need for external control components such as switches and potentiometers.
For this project, I decided to use an electromyography sensor (EMG) which detected the electrical activity related to muscle movement. Based on the sensor data, I tracked when the user's fingers/hand movement and synced prosthetic finger to match its movement. This allows the user to control this additional prosthetic finger with minimal effort and does not require the additional thinking. The finger was created using 3D printed parts and mounted the to the user's hand.
There were many future improvements I can explore with this project starting with a more accurate sensing method. The tracking of the muscle movement could possibly be more detailed if there were more sensors on the user. Further, the program algorithim could be improved to better predict the user's next movement based on the current sensor readings to reduce the slight latency present in the current iteration. Finally, I can also explore new bio-inspired materials that better match the functionality and appearance of a human finger.
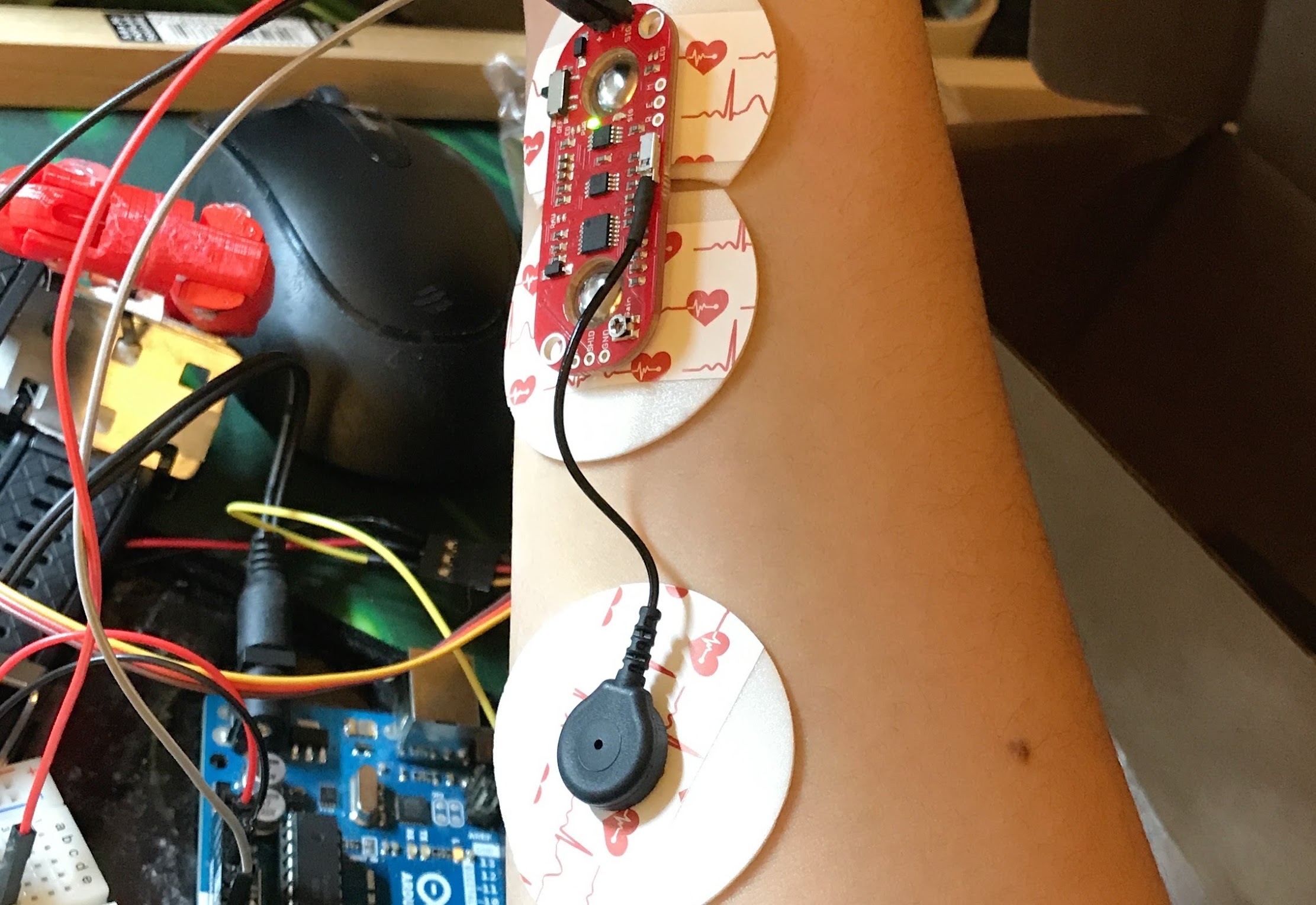
The objectives were to design a machine that is able to sort different pieces of trash into their respective bins (recycling, garbage, and compost). The purpose was to reduce the need to manually throw away trash into different bins, but also increase the accuracy of the sorting since it is done by a consistent machine instead of a human.
Our team created a simple belt conveyor system with a sorting mechanism attached to the end. Using TensorFlow we created an image recognition program that determined what category the trash should go into. The entire machine including the image recognition was powered off of a single Raspberry Pi.
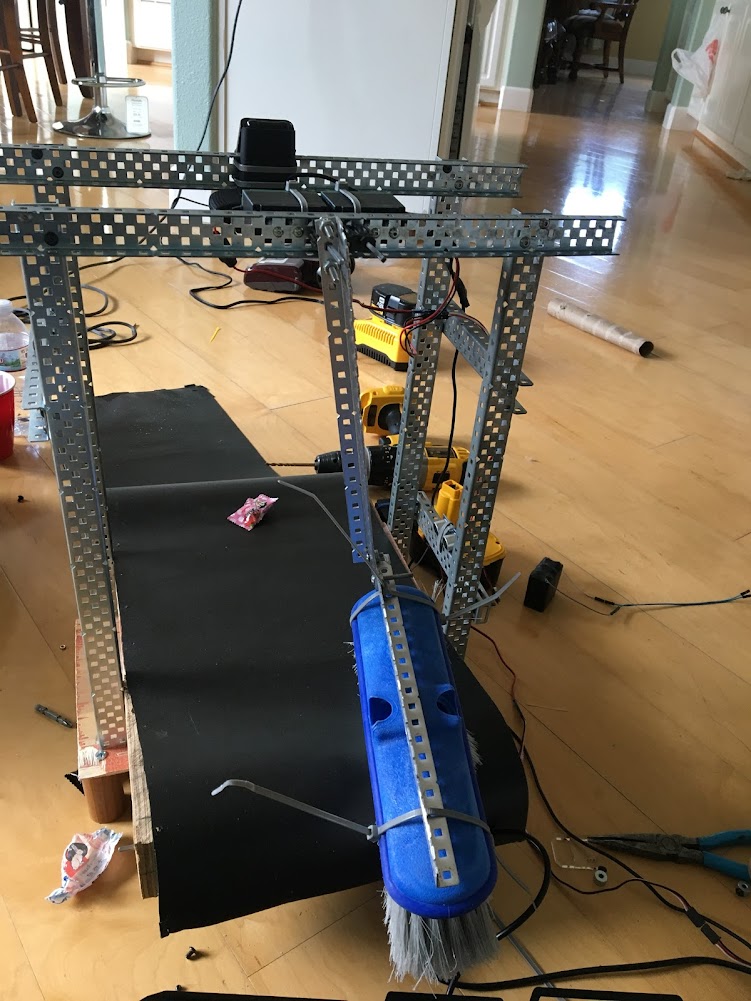
Due to the time constraint of this project, the mechanism was closer to an prototype/proof of concept. I think as another iteration, this machine can be better integrated into existing trashcans, and the sorting mechanism can be improved. Further, it would be ideal if the image recognition ran at a faster speed.
If you have any questions or want to talk, feel free to email me!!